- 标签
- 热门文章
- 推荐文章
Ansys Zemax优化中的环臂数详解
构建评价函数中表现比较突出的瞳面积积分方法中的环臂数,是这一个帖子主要讲解的。环主要决定每一个面每一个视场追迹光线的数目,臂数主要决定在光瞳中径向有多少根光线被追迹。
(1)在旋转对称系统中的轴上视场,追迹光线数目等于环的数目;
(2)在旋转对称系统中的其余视场,每一个圆环追迹的光线数目是臂数;
(3)定义的每一个面都追迹一组光线。

例子:
一个旋转对称光学系统,三个视场,包含一个轴上视场,四个面。那么三环六臂,会追迹多少根光学呢?
(1)每一个面轴上视场追迹的光线数目是3条;
(2)每一个面的其余视场追迹的光线数目是2*(3*6/2)=18条;
(3)四个面追迹的总光线数目是4*(3+18)=84条。
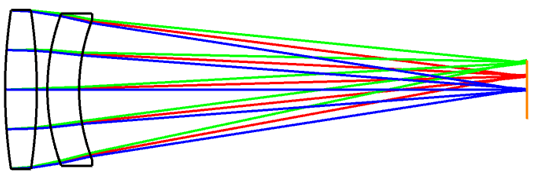
利用ZEMAX进行这个案例仿真,两个透镜四个面,三个视场,如下所示:

这时候,我们打开评价函数,设置三环六臂,评价函数如下所示:
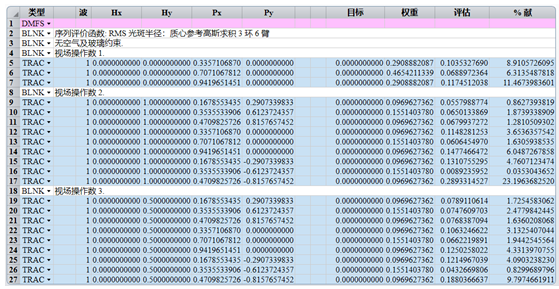
可以看出,评价函数中的TRAC中分为了三个区,视场1中,有三个TRAC,即三根光线,也就是环数,也就是对应上面的“(1)每一个面轴上视场追迹的光线数目是3条”。其次视场操作数2和视场操作数3分别对应9个TRAC,总共18,也就是对应上面的“(2)每一个面的其余视场追迹的光线数目是2*(3*6/2)=18条”。
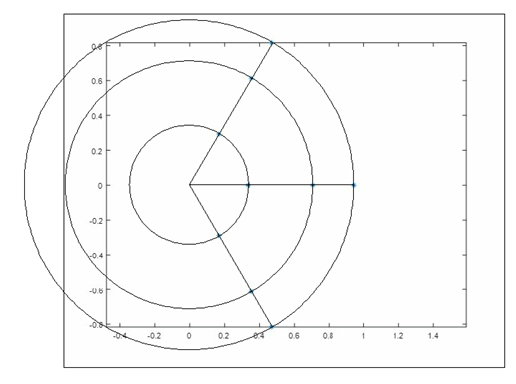
注意这里TRAC是针对入瞳上的,不针对面,然后乘以面的数目,即得到总光线数目。利用matlab对于视场2或者3中的TRAC中的Px和Py坐标进行绘图,如下所示,就能比较明显得与上文中的图对应上了。
x=[1.678553435098644E-001,3.535533905932737E-001,4.709825725599466E-001,... 3.357106870197288E-001,7.071067811865476E-001,9.419651451198934E-001,... 1.678553435098644E-001,3.535533905932737E-001,4.709825725599466E-001];y=[2.907339832810120E-001,6.123724356957946E-001,8.157657451533231E-001,... 0.000000000000000E+000,0.000000000000000E+000,0.000000000000000E+000,... -2.907339832810120E-001,-6.123724356957946E-001,-8.157657451533231E-001];plot(x,y,'*')axis equal
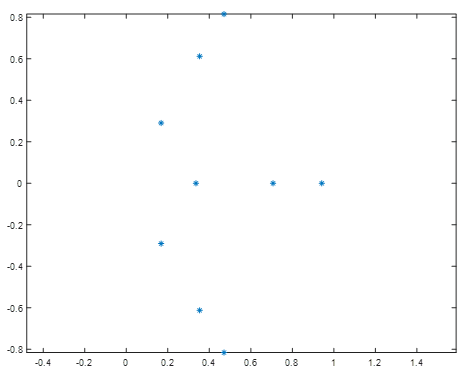
把上图与三环六臂图配合就比较容易理解了。
上一条:erwin元数据管理的地位及优势




 沪公网安备31011302006932号
沪公网安备31011302006932号